
材料の柔らかさを活かした次世代ロボットの開発
ソフトロボット研究室 Laboratory on Soft Robotics
教授:ホ アン ヴァン(HO Anh-Van)
E-mail:
[研究分野]
ロボティクス
[キーワード]
ソフトロボティクス、柔軟な触覚装置
研究を始めるのに必要な知識・能力
自然の物事と現象を解明することにより、柔軟物を積極的に利用した新機能の機構を開発する本研究室は、分析力や実践力を求め、機能材料の力を借りて技術課題を解決する想像力を重視しています。また、特定の分野・知識を問わずに、ものづくりに興味を持つ学生を歓迎します。
この研究で身につく能力
| ・機械設計、電子回路設計、加工方法 ・プログラミング、制御 ・計算、解析 |
・提案能力 ・コミュニケーション能力、論文作成力 ・グローバルな思考、起業魂 |
【就職先企業・職種】 機械設計会社、電機メーカ、大学等
研究内容
概要:
自然界のすべての現象には、何らかの形で必ずダイナミクスが関与しています。このダイナミクスを理解できれば、その現象を生じさせるために、メカニズムがどのように進化してきたかを理解することが可能になります。また、そのメカニズムをロボットの駆動装置または感覚装置に応用することで、新しい機構を創出できると考えられます。本研究室の長期研究計画・内容については以下の図をご参照ください。
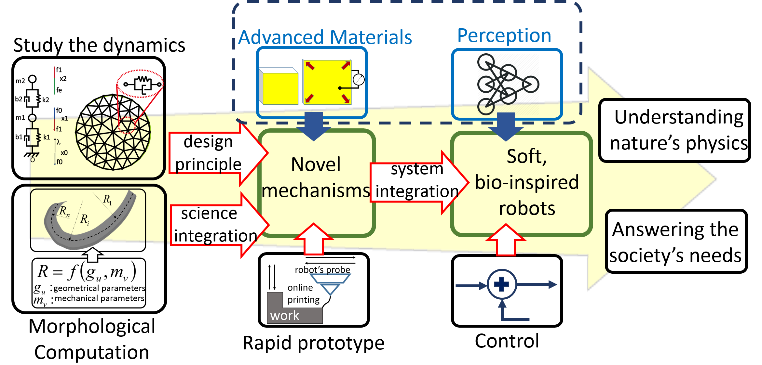
内容:
本研究では柔軟物とその形態制御を用いてセンシング装置・アクチュエーター・知能は以下のようなテーマで行われています。
【短期のテーマ】
| ① | 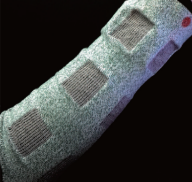 織物のような柔軟な質感を持つ新しい触覚センサの開発、そのマルチ・モーダルな特性を活かすセンシングに基づいた制御方法の開発を積極的に進めています。 織物のような柔軟な質感を持つ新しい触覚センサの開発、そのマルチ・モーダルな特性を活かすセンシングに基づいた制御方法の開発を積極的に進めています。 |
| ② |  遠隔操作システムにおいて、ロボット上の触覚センサによって得られた触感(圧力・摩擦・すべり)をヒトの指先に再現できる装置を開発しています。 遠隔操作システムにおいて、ロボット上の触覚センサによって得られた触感(圧力・摩擦・すべり)をヒトの指先に再現できる装置を開発しています。 |
| ③ | しわのメカニズムにヒントを得た、柔軟性を有するアクチュエータを用いて柔軟物を変形させることによって、同一のセンサのみでも異なるセンシング能力が得られる能動的な触覚センサの開発を目指します。 |
【長期のテーマ】
④ 柔軟物を掴めるソフトロボットハンドの開発
⑤ ラピッドプロトタイプ技術の開発
⑥ 柔軟な思考のあるロボットの開発 等
主な研究業績
- Van Ho et al., IEEE Transactions on Robotics, Vol. 27, No. 3, pp.411-424, 2011
- Van Ho et al., IEEE Sensors Journal, Vol. 13, No. 10, pp. 4065-4080, 2013,
- Van Ho et al., IEEE Robotics and Automation Letter, Vol. 1, Issue 1, pp. 585-592, 2016
使用装置
3Dプリンター、電動直動ステージ、6軸力覚センサ、触覚提示装置、小型NC加工機、高速度カメラ
研究室の指導方針
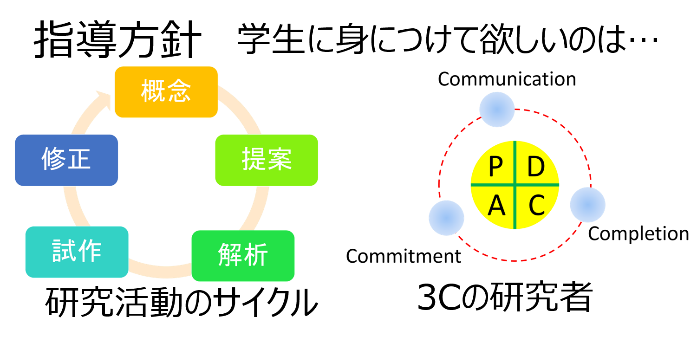
修士課程、博士課程に関わらず、本研究室に右側の図が示すような「研究活動のサイクル」や「3Cの研究者」を身につけた学生を育成します。そのため、毎週のミーティングで学生の進捗・成長を積極的にフォローします。
研究活動において、各メンバーの発想・アイデアを尊重にして、PDCA(Plan・Do・Check・Action)を通じて具体的な実現方法が見つかるまで指導します。
学生のキャリアパスの選択を全力でサポートします。
[研究室HP] URL:https://www.jaist.ac.jp/ms/labs/vanho/index.html