
無人移動ロボットによる知的環境センシング技術の開拓
移動ロボティクス研究室 Laboratory on Mobile Robotics
准教授:池 勇勳(JI Yonghoon)
E-mail:
[研究分野]
ロボティクス、センサ情報処理
[キーワード]
移動ロボット、ロボットビジョン、環境センシング、 SLAM(simultaneous localization and mapping)
研究を始めるのに必要な知識・能力
線形代数学、確率論等の数学の基礎力と、ロボット工学、計測工学、機械学習の全般的な知識を持っていた方が望ましく、好奇心を持って研究への意欲のある学生であれば歓迎します。自分のアイデアをロボットシステムに実装するために、簡単なハードウェアの制作とプログラミング言語(特にC++又はPython)に慣れている場合は有利です。
この研究で身につく能力
ロボティクスは、機械・電子・情報・制御・計測等の様々な分野の要素技術が融合される分野であり、システムインテグレーション技術が非常に重要です。具体的な研究テーマによって差はありますが、エンジニアとしての幅広い工学的知識を習得可能です。また、当研究室では実際の現場に適用可能な社会実装に焦点を当てた研究を積極的に行っているため、様々な社会ニーズと先端技術とのマッチング能力と、社会に貢献可能な新しい技術を創造する基礎能力を学ぶことができます。
【就職先企業・職種】 製造業、IT系企業、研究職等
研究内容
当研究室では、無人移動ロボットと各種センサ情報処理技術を通じて、実社会における様々な問題解決に貢献可能な研究に取り組んでいます。特に、人間の代わりに災害環境や豪雪環境など過酷な環境内に分布する様々な物理的な情報を計測することで、高度な知的環境認識及び運動制御技術を実現しています。
■被災地探査ロボットシステム
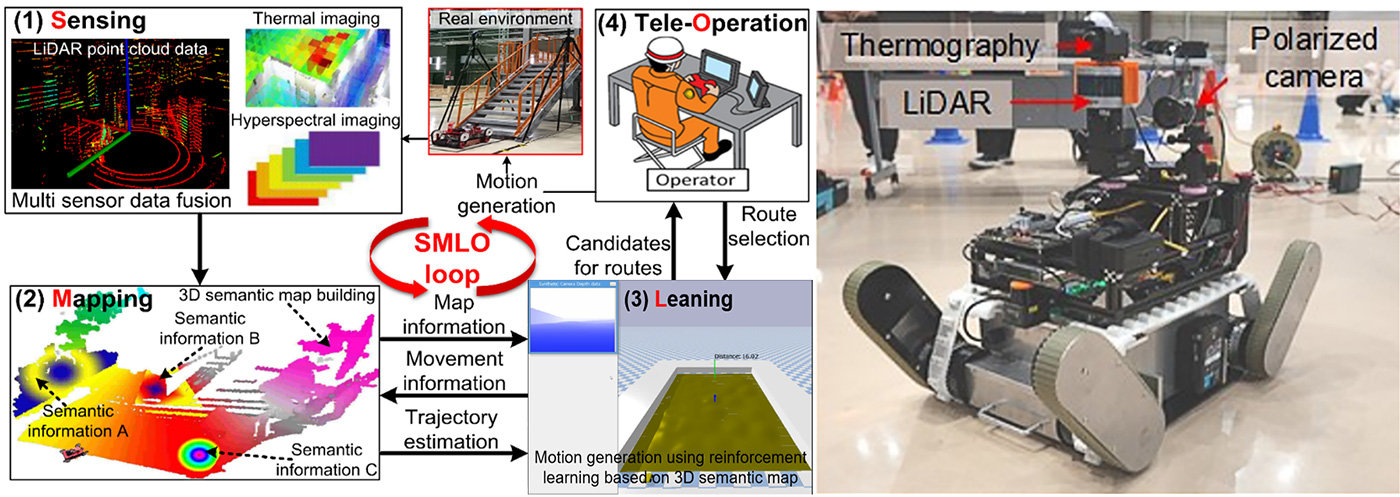 当研究室では、自然災害をはじめ原子力災害等の災害現場において、被害情報収集活動や原子炉建屋内の環境モニタリングを実施するための、半自律移動ロボットによるセマンティックサーベイマップ生成システムを開発しています。具体的には、ロボットに搭載されたサーモカメラやハイパースペクトルカメラ、LiDARなどの複数種類のセンサ情報を取得・融合し、環境の物理的な特徴量を含むマップを生成する技術を開発しています。
当研究室では、自然災害をはじめ原子力災害等の災害現場において、被害情報収集活動や原子炉建屋内の環境モニタリングを実施するための、半自律移動ロボットによるセマンティックサーベイマップ生成システムを開発しています。具体的には、ロボットに搭載されたサーモカメラやハイパースペクトルカメラ、LiDARなどの複数種類のセンサ情報を取得・融合し、環境の物理的な特徴量を含むマップを生成する技術を開発しています。
■自律除雪ロボットシステム
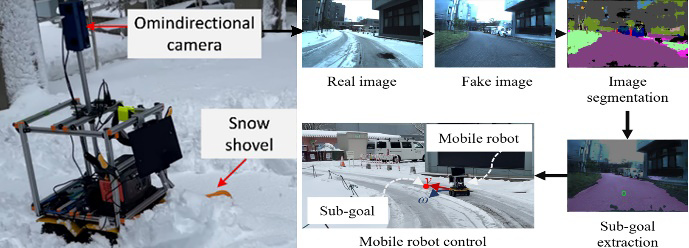 当研究室では、過酷な豪雪による冬期間の積雪環境において、除雪車の自動運転のための基盤技術を開発しており、自律除雪ロボットシステムに搭載したカメラによる周囲環境の知覚能力の向上を図るため、近年驚くほどの技術革新が見られる画像・動画生成AI技術に着目しています。夏季の道路環境と冬季の積雪道路環境との関係性を画像・動画情報により事前に学習しておくことで、冬季にも対応する夏季の偽画像を高精度で生成可能となり、雪に覆われた除雪対象の舗道領域を正確に検出することが可能です。
当研究室では、過酷な豪雪による冬期間の積雪環境において、除雪車の自動運転のための基盤技術を開発しており、自律除雪ロボットシステムに搭載したカメラによる周囲環境の知覚能力の向上を図るため、近年驚くほどの技術革新が見られる画像・動画生成AI技術に着目しています。夏季の道路環境と冬季の積雪道路環境との関係性を画像・動画情報により事前に学習しておくことで、冬季にも対応する夏季の偽画像を高精度で生成可能となり、雪に覆われた除雪対象の舗道領域を正確に検出することが可能です。
また、正確な積雪分布状態の予測による除雪ロボットの高度な経路計画や運動最適化性能を向上させるための研究を行っています。
■特殊環境における自律移動ロボットのナビゲーション
様々なサービスロボットの開発のために不可欠な要素である自律移動ロボットのナビゲーション技術は、ここ数十年間活発に研究されてきた分野であり、最近では既に多くの技術が実用化されつつあります。当研究室では、他にも様々な次世代センサからの計測情報を処理し、多様な特殊環境における自律移動ロボットのナビゲーションの性能を向上させるための研究を行っています。
主な研究業績
- Y. Wang, Y. Ji, H. Woo, Y. Tamura, H. Tsuchiya, A. Yamashita, and H. Asama, "Acoustic Camera-based Pose Graph SLAM for Dense 3-D Mapping in Underwater Environments," IEEE Journal of Oceanic Engineering, 46(3), PP. 829-847, 2021.
- Y. Ji, Y. Tanaka, Y. Tamura, M. Kimura, A. Umemura, Y. Kaneshima, H. Murakami, A. Yamashita, and H. Asama, “Adaptive Motion Planning Based on Vehicle Characteristics and Regulations for Off-Road UGVs,” IEEE Transection on Industrial Informatics, 15(1), pp. 599-611, 2019.
- Y. Ji, A. Yamashita, and H. Asama, “Automatic Calibration of Camera Sensor Network Based on 3D Texture Map Information,” Robotics and Autonomous Systems, 87(1), pp. 313-328, 2017.
使用装置
車輪型およびクローラ型の移動ロボット
LiDAR、測域センサ、光学カメラ、サーモグラフィ、音響カメラ等の環境計測センサ
研究室の指導方針
当研究室では、ロボティクスという学問分野を通じて、多方面に社会に貢献できる人材を育成することを目指しています。そのためには、社会ニーズを把握した上で関連する技術動向を反映させる指導が重要であると考えており、学生には実際の現場に適用可能な社会実装を目標とした研究テーマを与えています。次に、研究成果を世の中に発信するため、すべての学生に対して国内・国際学会発表および学術論文の作成を積極的に推奨しています。最後に、研究室内でのミーティングはもちろん他大学および企業との連携を通じて、複数人のグループでの働き方、コミュニケーション能力、プレゼンテーション能力等も鍛えることを目指しています。
[研究室HP] URL:http://robotics.jaist.ac.jp/