
知覚認知情報処理に基づく
知能ロボット実現を目指す
知能ロボティクス研究室 Intelligent Robotics Laboratory
教授:チョン ナクヨン(CHONG, Nak-Young)
E-mail:
[研究分野]
ロボティクス、知能機械システム
[キーワード]
自律型知能ロボット、知覚認知情報処理、日常生活支援ロボット
研究を始めるのに必要な知識・能力
力学、線形代数、微積分、電気電子工学、プログラミング、CADなどの基礎知識があることが望ましいが、ロボットに興味があり、目的意識を持っていれば学部・専攻科は問わない。
この研究で身につく能力
与えられた入力に対するロボットの動きを計算する能力。動力学シミュレーションソフトウェアを用いて計算機上で多種多様なロボットをモデリングし、その動きの高度な解析を行う能力。様々な環境条件における複雑な相互作用を伴うロボットの軌道を可視化する能力。ロボットの望ましい振る舞いを設計する能力および、意図通りに動かすために最新の制御理論を適用する能力。PCやマイクロプロセッサから実機のロボットを制御する能力。ネットワークを介してロボットやデバイスを制御する能力。ロボットの群れの行動を協調的に動作させるために、自律分散制御する能力。ロボットをより賢くするための人工知能・計算機科学の理論を実装する能力。知覚と身体運動を繋ぐ情報処理過程を解明するための総合的な研究能力。
【就職先企業・職種】 自動車関連、ソフトウェア及びハードウェア設計・開発関連、大学教員
研究内容
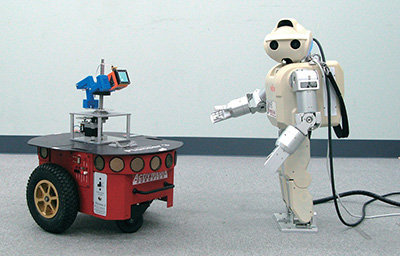
車輪型移動ロボットと人型ロボット
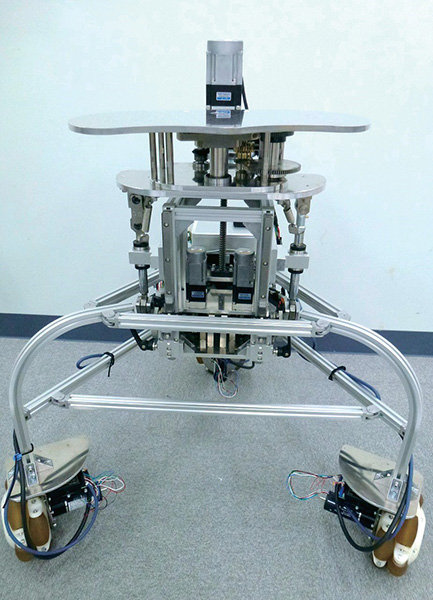
高齢者向け歩行支援ロボット
1)人間型ロボット:
人間の日常生活において、人間と協調して複雑な作業を行うことが可能な、高い安定性と信頼性を有する人間型ロボットの実現を目指す。最新の生物と脳研究の成果を踏まえ、より人間に近い仕組みを持つ運動機構と神経制御手法を追究する。人間との相互作用においては、ロボットの個性化を実現するために、認知発達プロセスに必要な機能を標準化するソフトウェアフレームワークの開発に取り組む。
2)ヒューマンロボットインタラクション:
人とロボットの間にお互いを理解するために必要なインタラクションチャンネルを開き、相互が情報を共有して協力し合うシステムを構築する。高齢者および障害者の歩行を支援する歩行支援機、人間とロボットの相互作用に基づくインテリジェントパワーアシスト台車などを開発している。
3)ネットワークロボット:
家庭やオフィスのような非整備環境下で効率的に人間共存型ロボットを運用するために、データキャリアを用いて情報処理機能を環境渇に分担させる情報インフラを構築する。個々の物体毎に操作知識を分散蓄積し、作業実行時に統合利用することで物体に対する高度なハンドリングを可能とする知識分散型制御手法を開発する。環境情報獲得のための受信信号の方向検知機能を有するRFIDシステムの開発及び応用を行う。

自律型無人飛行ロボット
4)車輪型移動ロボット・飛行ロボット:
車輪型・飛行型自律移動ロボットによる未知環境探索のための環境地図作成及び自己位置同定に関する研究を行う。効率的な環境認識のために、単一モータによる小型軽量3次元測距センサポジショナユニットの開発する。群ロボットにおいては、ロボット間の局所的な相互関係によって現れる創発的な振る舞いを研究し、環境に適応した編隊移動制御などを行う。
5)自律学習視覚システム:
両眼奥行知覚発達の神経モデルを提案し、ロボット上に自律学習自己キャリブレーション両眼システムを実装する。効率的な符号化手法の有効性を実証すると共に、両眼奥行知覚発達の工学的モデリングとヒューマノイドロボットへの適用を行い、神経生理学並びに生物学的解明を行う。
主な研究業績
- N. Y. Chong (Ed.), Networking Humans, Robots, and Environments, Bentham Science Publishers, eISBN: 978-1-60805-731-3, September 2013
- N. Y. Chong and Fulvio Mastrogiovanni (Eds.), Handbook of Research on Ambient Intelligence and Smart Environments: Trends and Perspectives, IGI Global, ISBN 978-1-61692-857-5, 2011
- W. Yang, N. Y. Chong, and B. J. You, Biologically Inspired Robotic Systems Control: Multi-DOF Robotic Arm Control, VDM Verlag, ISBN 978-3-639-23071-0, 2010
使用装置
小型人間型ロボット
車輪型移動ロボット
無人飛行ロボット
歩行支援ロボット
計測機器および工作機械
研究室の指導方針
ロボット技術の高度化とその実用化に向けた課題を中心に学生自らテーマを探り、研究を進めていきます。他者とのコミュニケーションや研究チーム毎のコラボレーションを通じて生まれる多角的で柔軟な視点と独創的な発想を養います。研究室の開発用のソフトウェアとハードウェアプラットフォームを存分に活用して、学生が新しいアイディアやコンセプトの実現を試みることを楽しめるよう、研究活動をサポートします。2週間1回程度のゼミや進捗報告、研究チーム毎の勉強会や打ち合わせを行います。コアタイムがなく、なるべく自由な雰囲気の中で学生一人一人が主体的に研究活動を行います。
[研究室HP] URL:https://www.jaist.ac.jp/robot/