Leafbot: A Soft Robot Conquers Challenging Terrains
Researchers have developed Leafbot, a soft, monolithic robot that uses vibration-driven locomotion to navigate complex terrains
Soft robots are revolutionizing the world of technology. Advancing robotics in automation, a team of researchers from the Japan Advanced Institute of Science and Technology has developed Leafbot. This monolithic soft robot moves efficiently across rugged terrains using a vibration-driven mechanism. By combining analytical modeling, finite element analysis, and real-world testing, the study provides valuable insights into terradynamics-- the science of movement on complex terrains-- unlocking new possibilities for diverse robotic applications.
Soft robotics is an emerging field in the robotic world with promising adaptability in navigating unstructured environments. Where traditional robots struggle with unpredictable terrains, soft robots are advancing in their navigational skills due to their high-end flexibility. One such transformative design is Leafbot, a soft robot developed by researchers at the Japan Advanced Institute of Science and Technology (JAIST). Led by Professor Van Anh Ho and involving doctoral course students Linh Viet Nguyen and Khoi Thanh Nguyen at JAIST, the research team explored Leafbot's adaptability across various uneven surfaces and terrains. Their findings were published in the IEEE Transactions on Robotics on January 24, 2025.
"Soft robots are increasingly recognized for their ability to navigate complex and unstructured environments, making them valuable for applications such as inspection and exploration. By leveraging a vibration-driven motion, we have designed a robot capable of overcoming such complex obstacles with minimal control mechanisms," says Prof. Ho.
Conventional vibration-based robots often require complex control algorithms to handle irregular terrains. In contrast, Leafbot uses its compliant structure of soft materials with a simple yet effective locomotion strategy to traverse slopes and navigate obstacles.
The team designed the Leafbot's structure using a soft monolithic silicone rubber with curved projections at the base to replicate limbs for crawling. The body of the soft robot was then attached to a vibrating motor to enable a vibration mechanism for locomotion. To explain the physics behind Leafbot's movement, the research team developed an analytical model incorporating factors such as centripetal forces, asymmetric friction interactions, and limb deformation. Using complementary finite element analysis simulations, they further refined their understanding of how the soft structure interacts with different terrains.
"We aimed to analyze how morphology influences locomotion. The experimental results validated our predictions, depicting how specific limb patterns optimize Leafbot's performance across challenging landscapes," adds Prof. Ho.
In addition to computational modeling, the researchers conducted extensive empirical testing. Three robot models with different limb configurations were compared for performance across various terrains, including slopes, semi-circular barriers, and step-field terrains. They found that the robot's curved limb morphology played a critical role in overcoming obstacles, enabling it to traverse slopes of up to 30 degrees as well as semi-circular barriers. Additionally, the successful integration of theoretical modeling and experimental validation ensured that Leafbot's design was both effective and scalable.
"Unlike rigid robots, which rely on precise actuation, Leafbot's adaptability allows for self-adjustment across different surfaces. This ability makes it particularly useful for applications that require mobility in confined and uneven spaces," notes co-author Linh Viet Nguyen, a doctoral student at JAIST.
The implications of this innovative robotic study are not restricted to laboratory experiments but extend far beyond, enabling real-world applications across diverse fields. Leafbot's adaptability can be particularly promising for missions in disaster-stricken areas, where fallen debris and uneven ground pose significant challenges. Since these robots are capable of navigating in confined spaces, they can also be used for inspecting pipelines, underground explorations, and other industrial settings that require autonomous mobility. Furthermore, these dynamic robots can also find applications in agriculture for activities like soil analysis and crop inspection, enabling precision farming without disturbing the delicate farm terrains.
Co-author Khoi Thanh Nguyen, a doctoral student at JAIST, comments on the significance of their breakthrough, "We believe that insights from our research, combined with advancements in AI and machine learning, could eventually enable tasks to be performed with minimal human intervention." He further concludes by saying, "By integrating sensory feedback systems and improving its energy efficiency, we envision Leafbot evolving into an autonomous system capable of real-time terrain adaptation and decision-making, transforming the field of soft robotics."
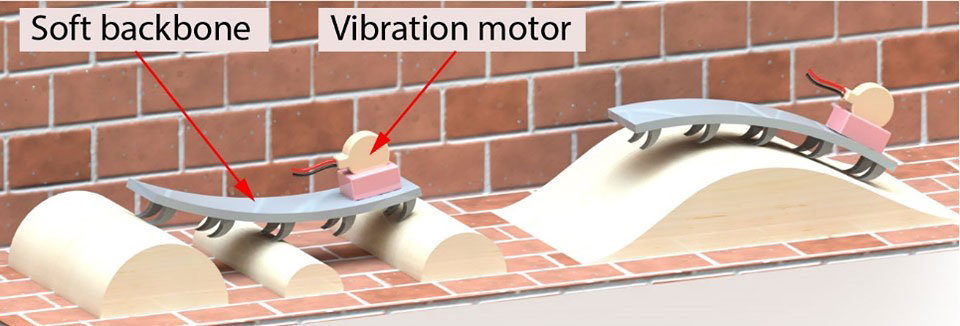
Figure 1. Leafbot's adaptibility across curved and semicircular terrains
Image caption:Illustrating the Leafbot's locomotion concept
Image credit: Van Anh Ho from JAIST
Image license: Original Content.
Usage restrictions: Cannot be reused without permission.
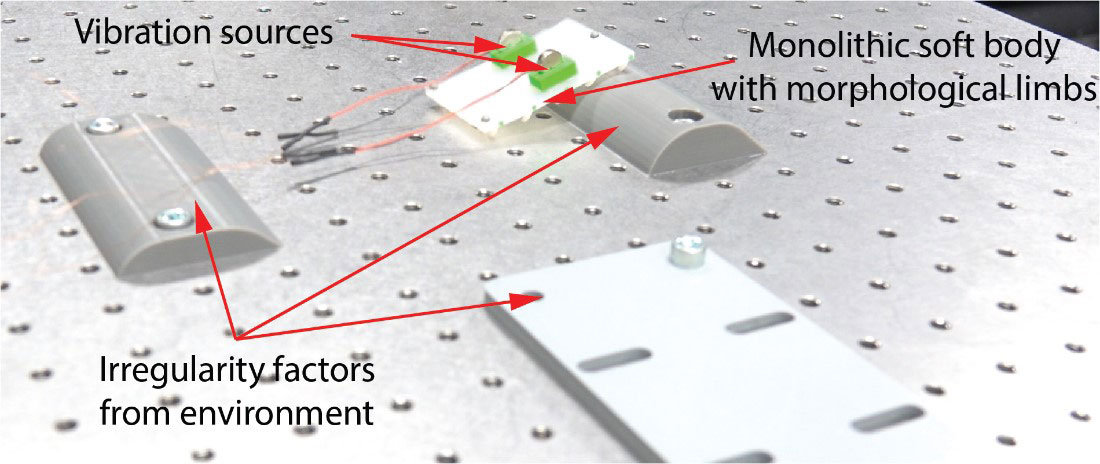
Figure 2. Leafbot's navigational skills and self-adjustment across irregular surfaces in different environments
Image caption: Leafbot-X5 navigates irregularities from environments and can steer in 2D spaces.
Image credit: Van Anh Ho from JAIST
Image license: Original Content.
Usage restrictions: Cannot be reused without permission.
Reference
| Title of original paper: | Terradynamics of Monolithic Soft Robot Driven by Vibration Mechanism |
| Authors: | Linh Viet Nguyen, Khoi Thanh Nguyen, and Van Anh Ho |
| Journal: | IEEE Transactions on Robotics |
| DOI: | 10.1109/TRO.2025.3532499 |
Funding information
This work was supported by JSPS KAKENHI (Grant-in-Aid for Scientific Research), number 21H01287.
February 17, 2025
