ConTac: A Novel System For Shape and Contact Detection of Continuum Robots
Researchers developed a new deep-learning-based system for shape and contact detection of continuum robots
Continuum robots have great flexibility which allows them to avoid obstacles. However, they form complex shapes during movement, which is difficult to track. Existing studies addressing this issue only focus on the shape, while ignoring contact detection. Now. researchers developed a novel shape and contact detection system for continuum robots called ConTac. This system can be applied to any continuum robot with suitable mechanisms and forms without any calibration, providing them with a sense of touch.
In nature, many organisms like octopuses with their flexible tentacles or elephants with their trunks, exhibit remarkable dexterity. Inspired by these natural structures, researchers aim to develop highly flexible continuum robots that offer robustness and safety. Ideally, a continuum robot is characterized by many degrees of freedom (DOFs) and the number of joints, more than needed for most tasks. These characteristics allow them to adjust and modify their shape dynamically, enabling them to avoid obstacles and unexpected situations. However, their complex movements make it difficult to characterize their shape and motion.
Traditional analytical techniques to obtain solutions for continuum robots' kinematic and dynamic problems rely on complex modeling, increasing computational cost. Alternatively, flexible sensors built into continuum robots can be used to track their shape and movement, but this method requires many low-resolution sensors, making the system cumbersome. A more promising solution is employing a single sensing module at the end of a continuum robot. However, previous studies in this direction have mostly focused on the robot's posture and did not address contact detection.
Addressing this gap, a team of researchers from Japan, led by Associate Professor Van Anh Ho from the Japan Advanced Institute of Science and Technology (JAIST), developed a new system called ConTac. This system can estimate the shape and contact of a robotic arm with soft skin. Dr. Ho explains, "The ultimate goal of this system is to be implemented in a continuum robot, but in this study, we focused on perception using an articulated robotic arm and soft skin for verification". The team included doctoral course students Tuan Tai Nguyen and Quan Khanh Luu from JAIST, as well as Dr. Dinh Quang Nguyen from VNU-UET university in Hanoi. Their study has been presented at the Robotics: Science and Systems (RSS) 2024 conference.
The ConTac system consists of a backbone that mimics the bending of a continuum robot, soft skin with markers, a camera to observe skin deformation, models for shape and contact sensing of the skin, and a contact-aware control regime. This system can be applied to any ConTac unit or any other robot with the same mechanism and form without any calibration. A ConTac unit is an assembled continuum-emulated robot arm with a backbone and soft skin. The researchers also developed an admittance-based controller for this system that uses perceptual information to guide the robotic arm's movements. Additionally, the ConTac unit is cost-effective and can be fabricated from conventional materials.
This innovative system employs two deep-learning models for shape reconstruction and contact detection of the soft-continuum skin. These models were trained entirely using simulation images and were then directly adapted to real robots without fine-tuning, saving time and resources. The system's transferability was tested on two different ConTac units, which performed similarly without any additional adjustments.
Highlighting the significance of this study, Dr. Ho remarks, "The ConTac system is aimed to be used in a variety of robotic systems without the need for complex adjustments. Flexible robotic arms equipped with our system are ideal for smart agriculture and healthcare services where robots must navigate environments with many obstacles and interact safely with humans. Their softness and flexibility combined with the ability to sense the surroundings make them perfect for interacting with plants and patients."
The sensing and control principles used in this framework could lead to new tactile sensors that can be attached to any existing robotics system, offering new sensing and control paradigms for safe human-robot interaction without altering the robot's original design. Looking ahead, Dr. Ho concludes, "Imagine a society where every robot and machine possesses a sense of touch. This transformation would revolutionize industries and daily life."
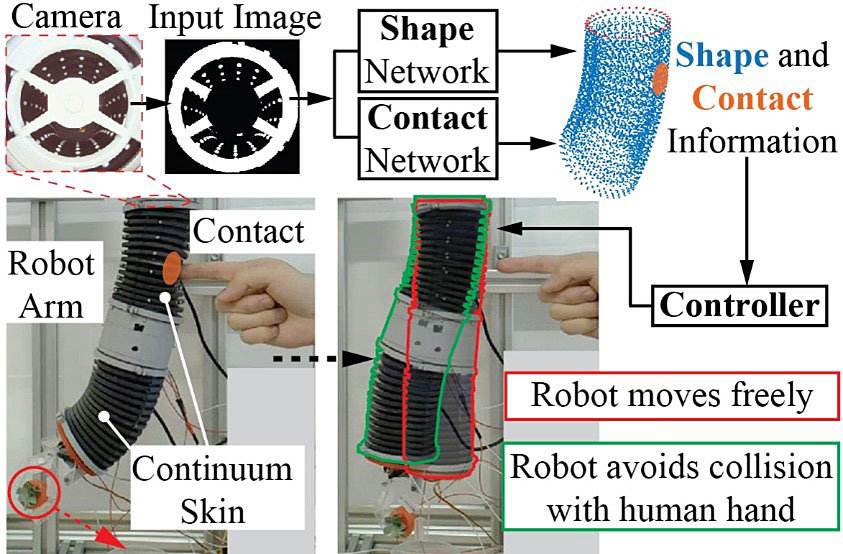
Figure 1. Concept of ConTac sensing system
Image Caption: When a human touches the robot, the robot changes its movement to avoid collision.
Image Credit: Van Anh Ho from JAIST
License: Original Content
Usage Restrictions: Cannot be reused without permission
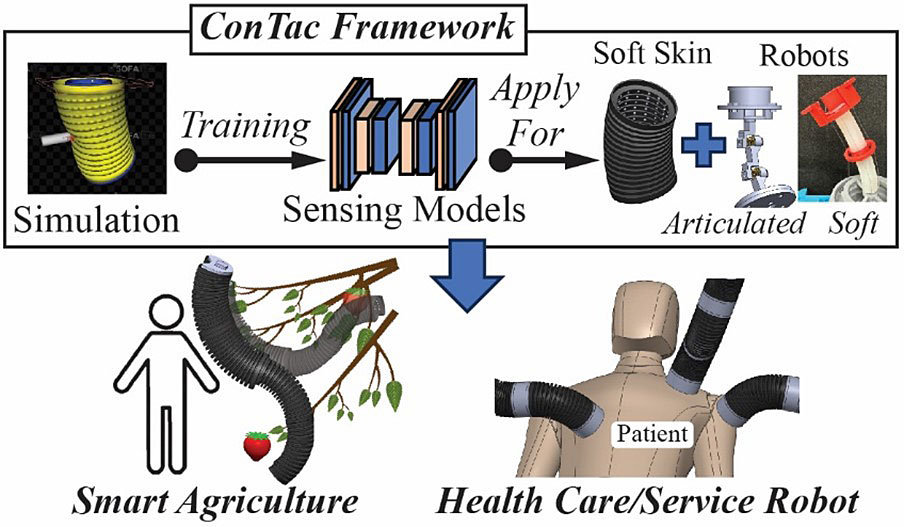
Figure 2. ConTac sensing framework
Image Caption: We use a simulation environment to collect training data, which is used to develop the sensing models. The robots with the sensing system are expected to be used for human-robot interaction applications.
Image Credit: Van Anh Ho from JAIST
License: Original Content
Usage Restrictions: Cannot be reused without permission
Reference
| Title of original paper: | ConTac: Continuum-Emulated Soft Skinned Arm with Vision-based Shape Sensing and Contact-aware Manipulation |
| Authors: | Tuan Tai Nguyen, Quan Khanh Luu, Dinh Quang Nguyen, and Van Anh Ho* |
| Comference: | Robotics: Science and Systems (RSS) 2024 |
| DOI | 10.15607/RSS.2024.XX.097 |
| URL: | https://enriquecoronadozu.github.io/rssproceedings2024/rss20/p097.pdf |
August 6, 2024
