
Utilization of materials softness in development of novel robotic mechanisms
Laboratory on Soft Robotics
Professor:HO Anh-Van
E-mail:
[Research areas]
Intelligent robotics
[Keywords]
soft robotics, soft robotic hands, soft sensor, morphological computation, bio-inspired robots
Skills and background we are looking for in prospective students
We are looking for potential students who have commitment in doing research at high level, good communication skill, team-work spirit. We particularly encourage students to be active in search for research questions and finding solutions. Students who have background in mechanics, materials science, mechatronics, informatics are encouraged to join our laboratory.
What you can expect to learn in this laboratory
In our lab, we focus on new know-hows on development of soft robotic mechanisms, such as soft sensors, soft robotic hands, bio-inspired mechanisms. Students will have chance to learn how to design mechatronic systems using soft, flexible materials for specific applications that common rigid mechanisms cannot implement.【Job category of graduates】
Graduate students in lab are expected to design novel mechanisms, modelling physical phenomenon, conducting experiments, data analysis, and writing papers
Research outline
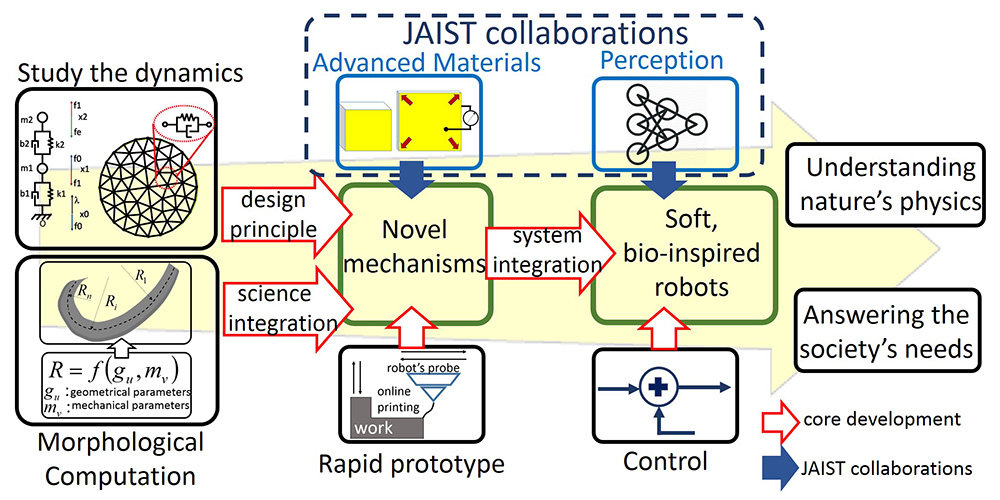
Our Laboratory aims to answer emerging needs of the society by proposals of novel robotic systems, ranging from fabrication of sensors, actuators, and intelligence. We particularly focus on dynamic investigation of nature phenomena to find out the underlying, dominating mechanisms that could then give hints to fabrication of novel structures.
Ideas are shaped under the light of novel technologies with integration of scientific methods, then integrated in robotic systems with specific applications. Results obtained in this process could be inversely utilized to understand the natures.
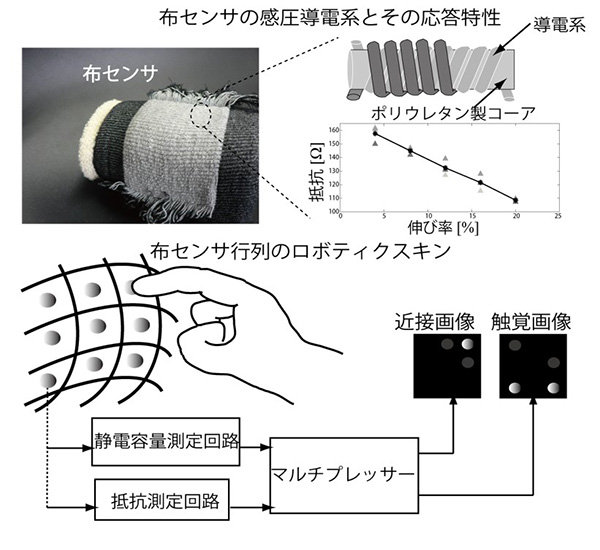
1) Fabric Sensor with Proximity and Tactile Sensing:
Human-in-the-loop task involving soft contact has become common in robotic application, especially in physical human-robot interaction. We attempt to fabricate a soft interface (or a robotic skin system) completely constructed from fabrics and soft materials that can sense both proximity and applied force from human's touch.

2) Soft robotic hand:
We proposed a novel approach to the fabrication of a soft robotic gripper/hand with contact feedback for grasping delicate objects. Each finger has a multilayered structure, consisting of a main structure and sensing elements. The gripping energy of the fingers is generated from the elastic energy of the pre-stretched softer layers, and controlled by simple tendon strings pulled/released by a single actuation. In addition, the hand includes a soft sensing elements for the detection of contact states with objects.
3) Bio-inspired mechanisms:
Nature is a great source of hints for development of bio-inspired robots. For example, we studied underlying physics of the wet adhesion mechanism of tree-frog’s toes, and created a micro-structured soft pad for enhancement of contact force with adhesion in wet environment.
Key publications
- J. Bernth, Van Anh Ho & Hongbin Liu, Morphological computation in haptic sensation and interaction: from nature to robotics, Advanced Robotics, Vol. 32, Issue 7, pp. 340-362, 2018
- Van Anh Ho et al., Wrin'Tac: Tactile Sensing System with Wrinkle's Morphological Change, IEEE Transactions on Industrial Informatics, Vol. 13, Issue 5, pp. 2496-2506, 2017
- Van Anh Ho and Shinichi Hirai, Design and Analysis of a Soft-Fingered Hand with Contact Feedback, IEEE Robotics and Automation Letters (RA-L), Vol 2, Issue 2, pp. 491-498, April, 2017.
Equipment
3D-printer, NC machine, 6-dof industrial robot arm, milling cutter machine, 6-dof force/torque sensor, vacuum chamber
Teaching policy
Students will independently conduct research in collaboration with other members in the laboratory. Seminar is taken place one time a week, but meeting with supervisor can be setup any time upon demand. The supervisor will strictly follow the student’s progress in research, and students must follow the PDCA (Plan-Do-Check-Action) cycle in research implementation. The supervisor will help students select suitable career path.
[Website] URL:https://www.jaist.ac.jp/ms/labs/vanho/index-e.html