
Pioneering Technology for Intelligent Environmental Sensing Using Unmanned Mobile Robot
Laboratory on Mobile Robotics
Associate Professor:JI Yonghoon
E-mail:
[Research areas]
Robotics, sensor data processing
[Keywords]
Mobile robot, robot vision, environmental sensing, SLAM (simultaneous localization and mapping)
Skills and background we are looking for in prospective students
To have basic knowledge of mathematics such as linear algebra and probability theory, and the general concepts of robotics, instrumentation engineering, and machine learning would be desirable. Highly motivated students with curiosity are welcome. In order to implement ideas on robotic systems, it is advantageous if students are accustomed to creating simple hardware and programming languages, especially C++ or Python.
What you can expect to learn in this laboratory
Robotics is a special field in which various areas such as mechanical, electronic, computer, control, and instrumentation engineering are seamlessly integrated. Thus, SI (system integration) technology is very important. Depending on the specific research theme, students will be able to acquire a wide range of engineering knowledge. In addition, since we are actively conducting research that is applicable to real sites, students can learn the ability to apply state-of-the-art technology to various problems in our society.
【Job category of graduates】 Manufacturing industry, IT industry, academia, etc.
Research outline
We conduct research to solve various problems for real-world applications through unmanned mobile robots and various sensor data processing technologies. Specifically, we realize advanced intelligent recognition and motion control technologies by measuring physical information distributed in various extreme environments such as disasters or heavy snowy environments.
■ Exploration Robotic System in Disaster Area
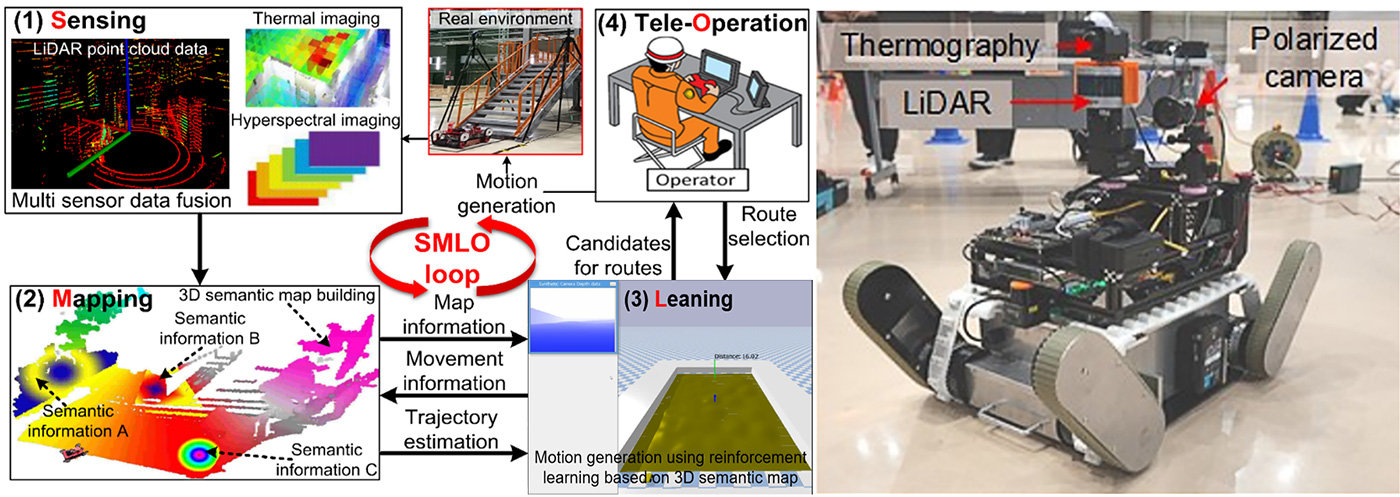 We develop a semi-autonomous mobile robot system that builds a wide-area survey map including semantic information to carry out damage monitoring in disaster areas. To this end, sensor fusion technology is developed for multiple types of sensors (e.g., thermography, hyperspectral cameras, and LiDAR) mounted on the robot to build map information including various physical properties of the environment.
We develop a semi-autonomous mobile robot system that builds a wide-area survey map including semantic information to carry out damage monitoring in disaster areas. To this end, sensor fusion technology is developed for multiple types of sensors (e.g., thermography, hyperspectral cameras, and LiDAR) mounted on the robot to build map information including various physical properties of the environment.
■ Autonomous Robotic System for Snow Removal
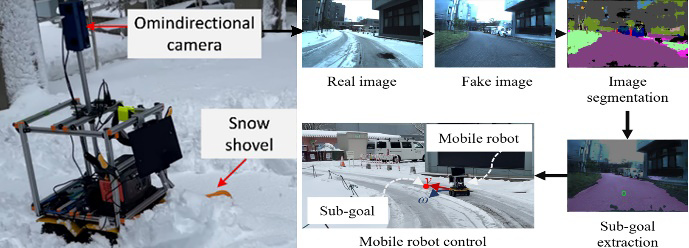 We develop fundamental technologies for the autonomous snow removal robot in heavy snowfall environments. In order to improve the perception performance of the surrounding environment by the camera installed on the robotic system, we focus on image-generative AI technology, which has seen amazing technological innovation in recent years. By training the relationship between summer and snow-covered winter environments in advance using image data, we can generate corresponding fake summer images with high accuracy even in the winter season, and accurately detect the areas of the pavement covered in snow that are the target area for snow removal.
We develop fundamental technologies for the autonomous snow removal robot in heavy snowfall environments. In order to improve the perception performance of the surrounding environment by the camera installed on the robotic system, we focus on image-generative AI technology, which has seen amazing technological innovation in recent years. By training the relationship between summer and snow-covered winter environments in advance using image data, we can generate corresponding fake summer images with high accuracy even in the winter season, and accurately detect the areas of the pavement covered in snow that are the target area for snow removal.
We also conduct additional research to improve the performance of the path planning and motion optimization of snow removal robots by accurately estimating snow distribution.
■ Mobile Robot Navigation in Extreme Environment
Navigation technology for autonomous mobile robots has been intensively studied in recent decades, and many technologies have already been put into practical use. Our goal is to improve the navigation performance of autonomous mobile robots based on measurement data from next-generation sensors in various extreme environments.
Key publications
- Y. Wang, Y. Ji, H. Woo, Y. Tamura, H. Tsuchiya, A. Yamashita, and H. Asama, "Acoustic Camera-based Pose Graph SLAM for Dense 3-D Mapping in Underwater Environments," IEEE Journal of Oceanic Engineering, 46(3), PP. 829-847, 2021.
- Y. Ji, Y. Tanaka, Y. Tamura, M. Kimura, A. Umemura, Y. Kaneshima, H. Murakami, A. Yamashita, and H. Asama, “Adaptive Motion Planning Based on Vehicle Characteristics and Regulations for Off-Road UGVs,” IEEE Transection on Industrial Informatics, 15(1), pp. 599-611, 2019.
- Y. Ji, A. Yamashita, and H. Asama, “Automatic Calibration of Camera Sensor Network Based on 3D Texture Map Information,” Robotics and Autonomous Systems, 87(1), pp. 313-328, 2017.
Equipment
Wheeled and crawler type mobile robots
Sensors for environmental measurement, such as LiDAR, range sensor, optical camera, thermography, acoustic camera, etc.
Teaching policy
We aim to cultivate human resources who can contribute to society through robot technology. To this end, it is important to understand the requirement in our society and relevant technological trends. Therefore, we are carrying out research topics applicable to real sites. Next, all students are encouraged to make presentations at domestic and international conferences and write journal papers. Finally, students will improve the following abilities: teamwork, communication, presentation skills through regular meetings in our laboratory as well as collaboration with other universities and companies.
[Website] URL:http://robotics.jaist.ac.jp/