
Toward Realizing Intelligent Robots Leveraging Perception and Cognitive Information Processing
Intelligent Robotics Laboratory
Professor:CHONG, Nak-Young
E-mail:
[Research areas]
Robotics
[Keywords]
autonomous intelligent robots, perception and cognitive information processing, assistive robots
Skills and background we are looking for in prospective students
It would be desirable, but not essential, to have a basic understanding of mechanics, linear algebra, calculus, programming, and CAD. If he/she is motivated and passionate about studying robotics, undergraduate studies do not matter.
What you can expect to learn in this laboratory
Ability to calculate the movement of robots for a given input. Ability to model a wide variety of robots using COTS dynamic simulation software programs and conduct an in-depth analysis of articulated, whole-body movements. Ability to visualize the trajectory of robots with complicated interactions under various environmental conditions. Ability to plan the desired behavior of robots and to apply the latest control theory to execute the plan as intended. Ability to control simulated and real robots using PCs and microprocessors. Ability to control robots and devices across wired and wireless networks. Ability to control the movements of robotic swarms in order to coordinate tasks in a distributed manner. Ability to implement the theory of artificial intelligence and computer science to make robots smarter. Comprehensive research capability to elucidate the information processing process linking the perception to body movement.【Job category of graduates】Automotive, Electronics, Software and IT Services Industry, Academia
Research outline
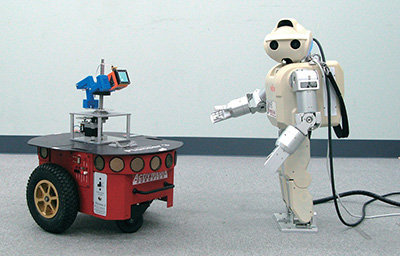
Wheeled mobile robot
and humanoid robot
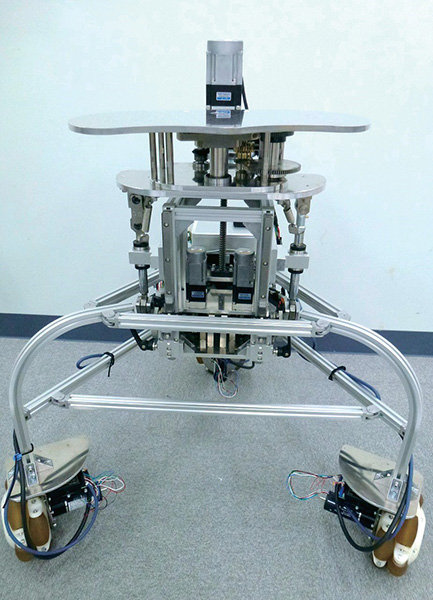
Walking assist robot
1. Humanoid Robots
We aim to realize a humanoid robot with enhanced stability and reliability that can perform complex tasks in cooperation with humans in our daily life. Leveraging the latest results in biology and brain research, we investigate the performance of bio-inspired mechanisms and neural control methods. We also develop an epigenetic based approach to building a developmental architecture for generating robot personalities and helping reduce human-robot interaction gaps.
2. Human-Robot Interaction
Establishing multi-modal interaction channels necessary to understand human intention, we build various types of user-intention driven assistive systems in support of society. Examples include an active robotic walker supporting ambulatory capabilities and a power assist cart helping a user easily transport objects in various weights.
3. Networked Robots
In order to realize an idea of human-robot symbiosis in our everyday environments such as a home or office, we construct an information-rich infrastructure that shares information processing functions with mobile robots using a data carrier. We develop distributed control methods that enable sophisticated manipulation tasks through integrating distributed knowledge of individual objects. Different types of direction sensing RFID systems are developed and applied to rapid data acquisition and autonomous indoor navigation, helping mobile robots make decisions on the fly.

Unmanned aerial vehicle
4. Autonomous Mobile Robots
We develop simultaneous localization and map building algorithms for autonomous wheeled and unmanned aerial vehicles exploring unknown environments. In order to facilitate the recognition of surrounding environments, we design and manufacture a series of small, lightweight three-dimensional range sensor positioners equipped with a single motor. We also investigate the collective and emergent behavior of robotic swarms that appears through local interactions among individual robots, and flocking algorithms that control swarm formations adapting to any environmental changes.
5. Perceptual Learning
We develop computational neural models of active depth perception based on smooth eye pursuit and motion parallax toward implementing self-calibrating artificial vision systems. In addition to demonstrating the effectiveness of the efficient coding hypothesis, we conduct neurophysiological and biological elucidation of engineering models designed to implement developmental learning theories of active perception on a humanoid robot.
Key publications
- N.Y. Chong, Y.-J. Cho (Eds), Distributed Autonomous Robotic Systems, Springer, 2016
- N.Y. Chong (Ed), Networking Humans, Robots, and Environments, Bentham Science, 2013
- N.Y. Chong, F. Mastrogiovanni (Ed), Handbook of Research on Ambient Intelligence and Smart Environments: Trends and Perspectives, IGI Global, 2011
Equipment
humanoid robots, wheeled mobile robots, unmanned aerial vehicles, walking assist robots, measuring instruments and machine tools
Teaching policy
Within the framework of research projects aiming at improving the robotics technology and its real world applications, students explore different topics and are responsible for conducting themselves in achieving their goals. Multi-faceted and flexible viewpoints and innovative thoughts are cultivated through communications with other members and teamwork and collaboration. Students are encouraged to utilize the software and hardware resources available in the laboratory and enjoy implementing half-baked ideas and new concepts. Seminars and progress report meetings are held periodically. Occasionally, we also hold project team meetings. Overall, students conduct research on their own initiative under flextime in an atmosphere of freedom.
[Website] URL:https://www.jaist.ac.jp/robot/